Overview of Micronix Multi-Phase Piezo Motors
Micronix’s patented multi-phase stick-slip piezo motor (U.S. Patent No. 8,593,033) combines multiple piezo stacks with controlled phase offsets to reduce backward motion, increase blocking force, and improve motion stability over extended travel ranges. These motors rely on the inverse piezoelectric effect, where an applied voltage produces precise mechanical deformation in piezoelectric materials. The innovation lies in translating these microscopic deformations into smooth, repeatable macroscopic motion across long travel ranges.
Introduction
Nano-positioning has become increasingly important in motion control as device dimensions shrink across applications such as life sciences, optics, and semiconductor manufacturing. In recent years, long-travel piezo-driven stages have filled this technology gap, providing nanometer resolution and high position stability.
Historically, piezos were primarily used for very short actuation ranges, typically in the micron to sub-millimeter range, requiring hybrid stages to achieve extended travel at nanometer precision. More recently, piezo motors have emerged extending the limited range of piezo actuators into effectively unlimited linear or rotary motion through friction-based mechanisms.
Piezo Motor Fundamentals
Key Components and Definitions
Piezoelectric material - A crystalline solid that deforms predictably when voltage is applied (inverse piezoelectric effect) and generates charge when mechanically stressed (direct effect).
Piezo stack - Multiple layers of piezo material bonded together to amplify displacement and force.
Piezo actuator - A device using a piezo stack to produce controlled mechanical displacement and force when voltage is applied.
Piezo motor - A system that converts the small, precise deformations of a piezo actuator into continuous motion, typically through friction-based mechanisms.
Piezo positioner - A mechanism that includes a piezo motor, guidance, structural frame, and often feedback to precisely position an object.
Motor Categories and Stick-Slip Motion
Friction-based piezo motors can be broadly categorized as resonant or non-resonant. Resonant (ultrasonic) piezo motors operate at the piezo’s natural frequency, enabling very fast motion, but typically require closed-loop feedback to achieve extremely fine step resolution. Non-resonant piezo motors operate below the mechanical resonance of the piezo and are often audible. Among non-resonant designs, stick-slip (inertial) motors are the most common and form the foundation of Micronix piezo positioners. These designs provide highly stable nanometer and sub-nanometer resolution while allowing effectively unlimited travel.
The basic principle of stick-slip inertial motion relies on controlled friction and the inertia of the moving element, typically the carriage of a positioner. During the stick phase, the applied voltage ramps up slowly, causing the piezo to deform gradually. The total expansion of the piezo in the stick phase is typically on the order of microns, design dependent. This slow deformation engages static friction, moving the sliding element forward, producing the useful travel of the system.
During the slip phase, the voltage changes rapidly, causing the piezo to deform quickly. Static friction is overcome and the interface decouples, allowing the piezo to reset while the sliding element remains nearly stationary. The inertia of the sliding element prevents it from fully following this rapid motion, resulting in a backward motion relative to the intended direction of travel. Repeating this cycle produces continuous motion in micro-step increments until the desired position is reached.
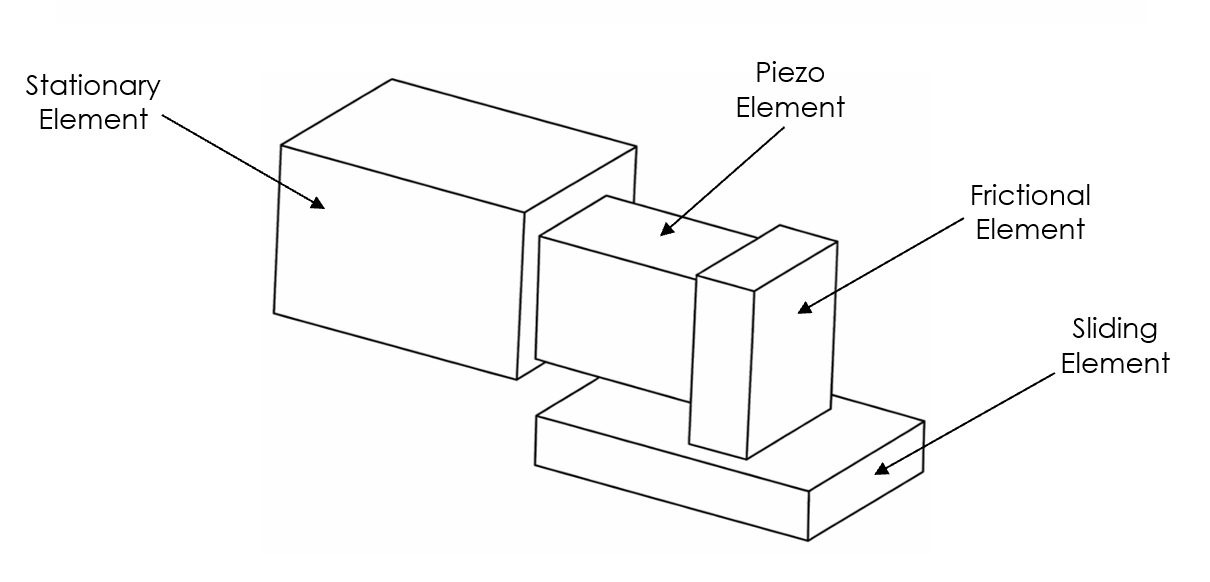
Image modified from Patent # 8,593,033 documents
Example of linear translation with single-phase motor
The image above represents a single-phase stick-slip piezo motor as utilized in traditional implementations of this concept.
Single-Phase vs. Multi-Phase Piezo Motor Architectures
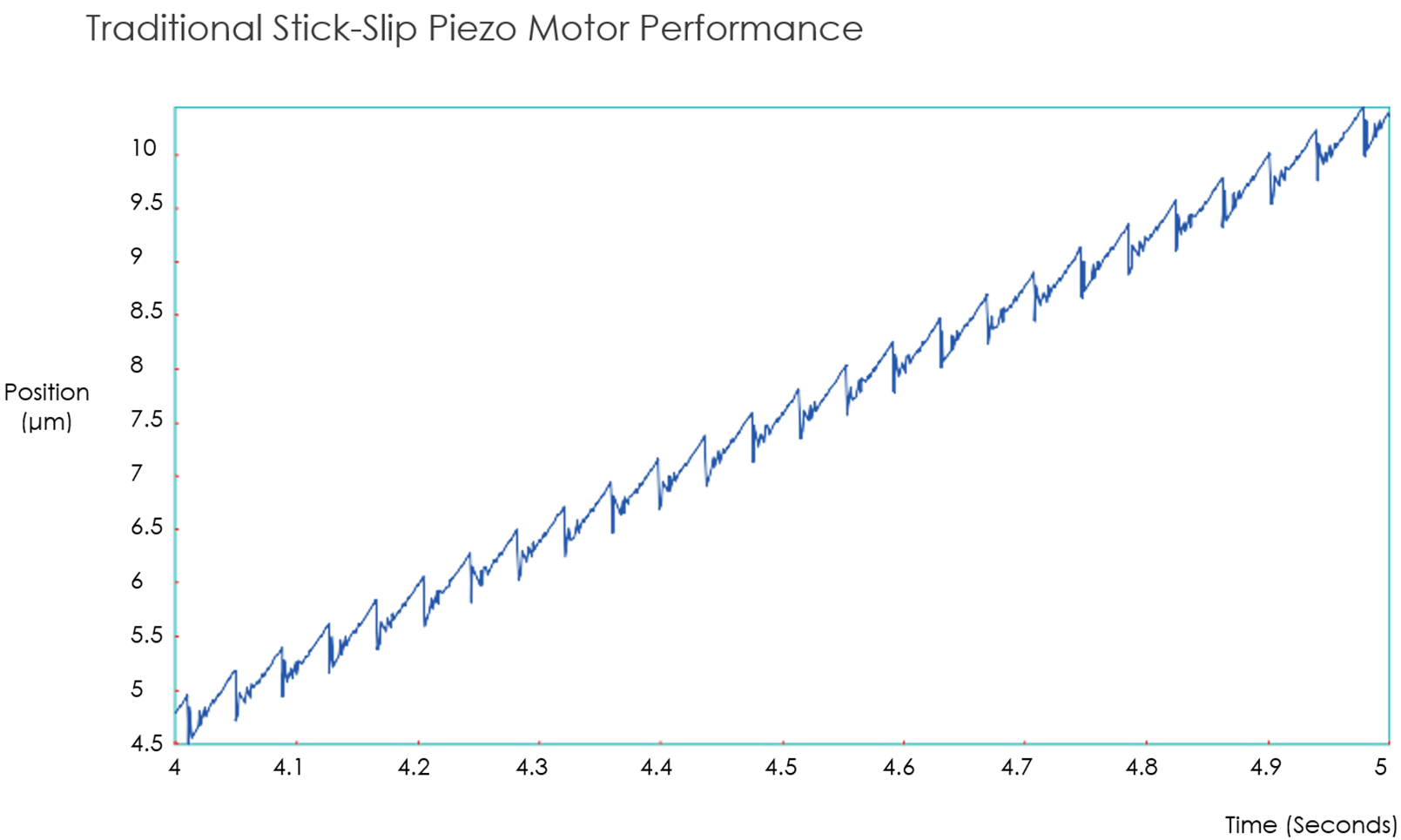
The fundamental limitation of conventional single-phase stick-slip operation is the backward motion that occurs during each slip phase, reducing net forward displacement and overall efficiency. This positional loss can be significant, in some cases approaching 50% of the intended travel per cycle. Additionally, the repeated slip events introduce vibration and velocity variation, particularly at lower speeds, resulting in reduced motion stability.
The chart below shows measured position versus time data for a commercially available single-phase piezo positioner. As illustrated, significant backward motion occurs during each slip phase, limiting net displacement. The total velocity in this sample is 5.5 μm/s.
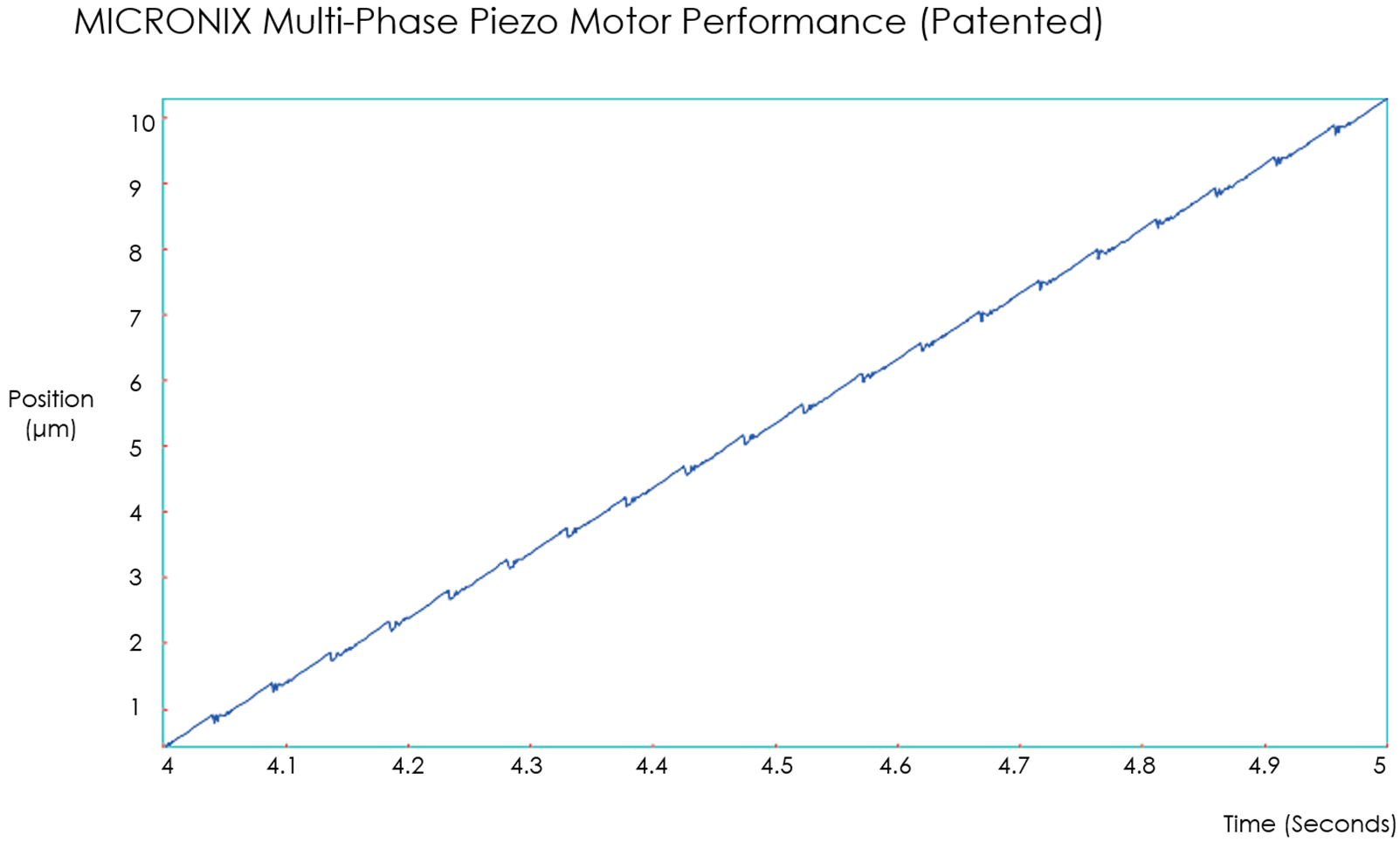
The limitations of traditional stick-slip designs are directly addressed by Micronix’s patented multi-phase architecture. By using two or more piezo stacks acting on the same sliding element with controlled phase offsets, the system maintains continuous forward drive. When one piezo enters the slip phase, another remains engaged in the stick phase, sustaining motion of the sliding element. This overlapping operation reduces backward motion, improves velocity stability, and distributes the mechanical work across multiple friction interfaces, increasing achievable blocking force and overall efficiency.
The second chart above demonstrates the performance improvement of the Micronix multi-phase design under comparable mechanical conditions. The sawtooth waveform is tighter, indicating reduced backward motion and smoother velocity. The slope is steeper, corresponding to a velocity of 9.5 μm/s, a nearly 72% improvement: (9.5 − 5.5) / 5.5 ≈ 72%
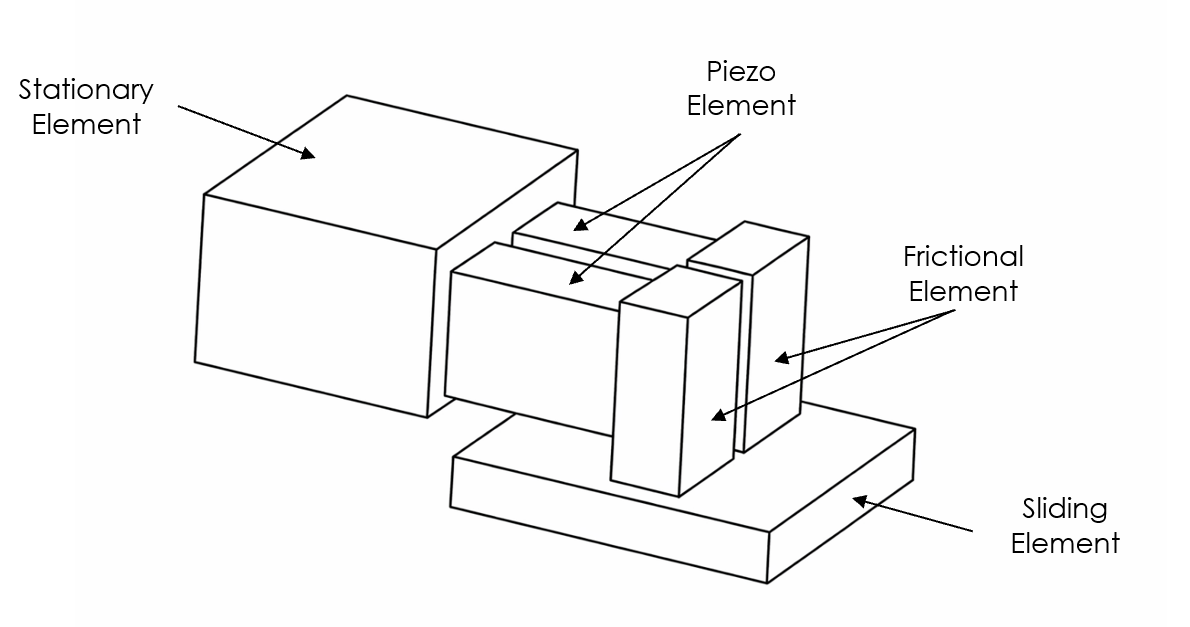
Image modified from Patent # 8,593,033 documents
Example of linear translation with Micronix multi-phase piezo motor
Multi-phase operation also reduces sensitivity to load variations and friction changes, enabling more predictable performance over extended travel ranges. Phase offsets can be tuned to optimize performance for different load conditions and travel speeds, providing system-level controllability and repeatability not achievable with single-phase designs. This represents a key differentiator in Micronix piezo motor technology.
Drive Waveform and Direction Control
Motion in both single- and multi-phase piezo positioners is governed by the voltage waveform applied to each piezo stack, generated and precisely controlled by a dedicated piezo motion controller. The controller defines the voltage profile required to produce the desired deformation of the piezo. In stick-slip operation, this is an asymmetric sawtooth waveform, where the slow ramp enforces the stick phase and the rapid transition induces the slip phase.
In multi-phase systems, waveform timing is critical. Each piezo element is driven with defined phase offsets such that one element is actively driving while another is resetting. This coordinated overlap is fundamental to multi-phase operation.
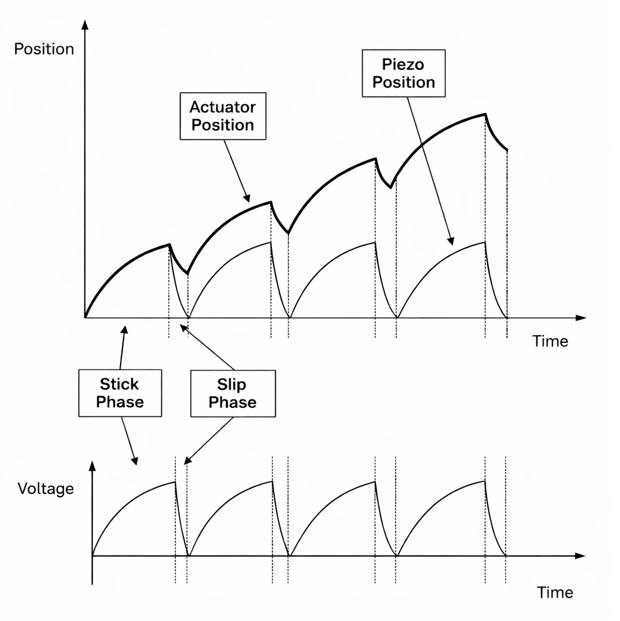
Image modified from Patent # 8,593,033 documents
Direction of motion is determined at the controller level by reversing the waveform sequence, effectively swapping the slow and fast portions of the signal. While the piezo undergoes the same physical expansion and contraction, this change in timing alters the net frictional interaction, resulting in motion in the opposite direction.
Precise waveform control is essential for stable operation. Adjustments to amplitude, frequency, and phase relationships allow optimization of step size, velocity, available force, vibration, and overall efficiency across varying loads and operating conditions.
Summary
Micronix multi-phase piezo motors redefine the performance limits of stick-slip motion by directly addressing the inherent inefficiencies of single-phase designs. Through controlled phase overlap, backward motion is significantly reduced, enabling higher net displacement, smoother velocity profiles, and increased blocking force. This results in more efficient motion and greater stability across extended travel ranges.
Integrated into Micronix piezo positioners, this architecture delivers consistent, predictable performance with reduced sensitivity to load and friction variations. The result is reliable nano-positioning with both high resolution and long travel capability, making these systems well suited for demanding applications in life sciences, microscopy, optics, semiconductor manufacturing, metrology, and precision micro-manipulation.
For a deeper technical understanding of this multi-element stick-slip motor architecture, refer to U.S. Patent No. 8,593,033. To learn more about Micronix piezo motor solutions and system integration capabilities, contact info@micronixusa.com.